K2E-B-G5-12 · Paper Note
LiDAR-NeRF
- Description:LiDAR-NeRF 论文笔记 — 新视角 LiDAR 点云合成,range image 表示 + 可微渲染联合建模深度/强度/ray-drop,提出 NeRF-MVL 基准
- My Notion Note ID:K2E-B-G5-12
- Created:2024-03-31
- Updated:2026-06-11
- License:转载欢迎:转载请注明作者 Yu Zhang 并附原文出处(yuzhang.io)
Table of Contents
- 1. Summary
- 2. Key Contributions
- 3. Method
- 4. Experiments & Results
- 5. Ablation & Discussion
- 6. Strengths / Limitations / Future Work
- References
1. Summary
Title: LiDAR-NeRF: Novel LiDAR View Synthesis via Neural Radiance Fields Authors: T. Tang, L. Gao, G. Wang, Y. Lao, P. Chen, H. Zhao, D. Hao, X. Liang, M. Salzmann, K. Yu Paper: arXiv:2304.10406 (ACM MM 2024) Github: tangtaogo/lidar-nerf
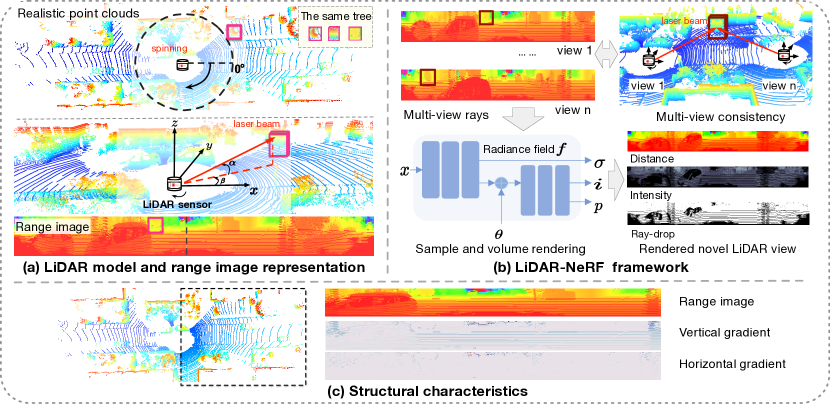
LiDAR-NeRF:新视角 LiDAR 点云合成:给定多视角 LiDAR 观测,生成任意新视角下的点云(距离 + 强度 + ray-drop)。与 RGB NeRF 本质不同:LiDAR 是稀疏 3D 测量 + 传感器属性,LiDAR-NeRF 把点云投影成 range image 后套 NeRF 体渲染框架,同时建模几何 (距离) + 强度 + ray-drop 三路输出。针对低纹理区域(地面、长墙)提出结构正则防止过平滑。
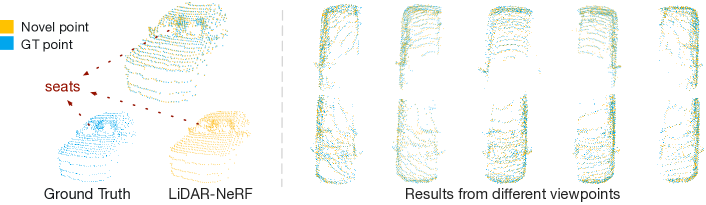
同时提出 NeRF-MVL 基准(76k+ 帧、9 类物体、多 LiDAR 绕物方形轨迹)。NeRF-MVL 物体级 F-score 98.50%(PCGen 90.40%);KITTI-360 场景级 Chamfer 0.081(PCGen 0.187)。
2. Key Contributions
- 首个可微 LiDAR 视图合成框架:统一体渲染距离 / 强度 / ray-drop,无需显式建网格
- Range image 表示:把 3D 点云投影为 伪图,按行/列对应激光束,套用 NeRF 渲染流程
- 结构正则:在低纹理区(地面/长墙)用梯度掩码约束局部几何连续性,防过平滑
- NeRF-MVL 基准:76k+ 帧,9 类物体,多 LiDAR 配置,专为 LiDAR 新视角合成设计
- 基于 Instant-NGP(iNGP,多分辨率哈希编码实时 NeRF,笔记)实现,单 RTX 3090 运行,训练 30k 步
3. Method
3.1 Range Image 表示
3D 点 距离 ,投影为 range image 像素坐标:
为垂直 FOV, 为下视角, 为 range image 分辨率, 为水平方向角。
转成图像域后每像素对应一条激光束(射线),直接套用 NeRF 体渲染框架,按射线积分距离/强度/ray-drop。
3.2 可微 LiDAR 渲染
隐式场对位置 + 方向 输出三个量:
为密度(几何), 为强度(材质反射), 为 ray-drop 概率(激光束未能返回)。
体渲染权重 ,,三路积分:
/ / 分别为渲染距离、强度、ray-drop 期望值。
采样:768 粗 + 64 精细采样点每射线;优化器 Adam (lr=1e-2),训练 30k 步,RTX 3090。
3.3 结构正则与损失函数
标准 NeRF 对低纹理区(平地、长墙)忽略局部结构,导致地面过平滑。提出结构正则:仅在梯度掩码 (GM) 标记的低纹理区施加梯度一致约束:
为真值 range image 的梯度掩码, 为渲染结果的梯度掩码。
总损失(4 项):
- :距离 L1 损失; 为渲染期望终止距离, 为 LiDAR 实测 range()
- :强度 L2 损失; 为渲染反射强度, 为真值强度()
- :ray-drop 概率 L2 损失; 为渲染 drop 概率, 为真值标签(光线是否被遮挡/缺失,)
- :结构正则,(权重远大于其他项,强调低纹理区几何约束)
- :射线批次(range image 中的采样光线集合)
4. Experiments & Results
数据集
| 数据集 | 类型 | 评估 |
|---|---|---|
| KITTI-360 | 真实自驾场景级 LiDAR | Chamfer, F-score, RMSE |
| NeRF-MVL (本文提出) | 76k+ 帧,9 类物体绕物方形轨迹 | Chamfer, F-score, RMSE |
KITTI-360 场景级结果
| Method | Chamfer ↓ | F-score ↑ | RMSE (m) ↓ |
|---|---|---|---|
| LiDARsim | 0.951 | 66.89% | 5.745 |
| PCGen | 0.187 | 87.16% | 4.328 |
| LiDAR-NeRF (Instant-NGP+reg) | 0.081 | 92.49% | 3.615 |
NeRF-MVL 物体级结果
| Method | Chamfer ↓ | F-score ↑ | RMSE (m) ↓ |
|---|---|---|---|
| PCGen | 0.078 | 90.40% | — |
| LiDAR-NeRF | 0.005 | 98.50% | 1.305 |
物体级大幅领先:Chamfer 0.005 vs PCGen 0.078(15.6×),F-score 98.50% vs 90.40%。
5. Ablation & Discussion
- 结构正则:去掉后地面区域明显过平滑,Chamfer 上升; 远大于其他权重(),强调低纹理区几何约束
- Ray-drop 建模:不建模 ray-drop 的版本产生大量虚假表面点( 的 L2 监督足以约束)
- Instant-NGP 后端:相比原版 NeRF 快约 100×,使单 GPU 30k 步训练可行
NeRF-MVL 基准的意义:现有 LiDAR 仿真评估缺乏标准,NeRF-MVL 提供多物体类别、多 LiDAR 配置的系统性评估框架。
6. Strengths / Limitations / Future Work
Strengths
- 首个统一距离/强度/ray-drop 的可微 LiDAR 合成框架
- NeRF-MVL 基准为 LiDAR 视图合成提供标准评测
- KITTI-360 Chamfer 比 PCGen 低 2.3×
Limitations
- 每场景独立训练(无泛化能力,同原版 NeRF)
- 仅静态场景;动态目标(行人、车辆)未处理
- 不是 SLAM 系统(无跟踪/建图流程,仅合成)
Future Work (论文)
- 动态场景扩展
- 联合 LiDAR-相机渲染
References
- Tang, T., et al. (2023). LiDAR-NeRF: Novel LiDAR View Synthesis via Neural Radiance Fields. ACM MM 2024. arXiv:2304.10406
- 项目页: tangtaogo.github.io/lidar-nerf-website
- NeRF-LOAM 笔记:LiDAR 神经隐式 SLAM(有跟踪/建图)
- NeRF 笔记:体渲染基础
- Instant-NGP 笔记:渲染后端