K2E-B-G5-9 · Paper Note
NeRF-LOAM
- Description:NeRF-LOAM 论文笔记 — 纯 LiDAR 神经隐式 SLAM,八叉树体素 embedding + 神经 SDF + 地面感知监督,大尺度室外里程计与稠密重建
- My Notion Note ID:K2E-B-G5-9
- Created:2024-03-31
- Updated:2026-06-11
- License:转载欢迎:转载请注明作者 Yu Zhang 并附原文出处(yuzhang.io)
Table of Contents
- 1. Summary
- 2. Key Contributions
- 3. Method
- 4. Experiments & Results
- 5. Ablation & Discussion
- 6. Strengths / Limitations / Future Work
- References
1. Summary
Title: NeRF-LOAM: Neural Implicit Representation for Large-Scale Incremental LiDAR Odometry and Mapping Authors: J. Deng, Q. Wu, X. Chen, S. Xia, Z. Sun, G. Liu, W. Yu, L. Pei Paper: arXiv:2303.10709 (ICCV 2023) Github: JunyuanDeng/NeRF-LOAM
NeRF-LOAM (LOAM = LiDAR Odometry and Mapping,激光雷达里程计与建图; 上海交大, 2023):纯 LiDAR 神经隐式 SLAM,针对大尺度室外场景。将神经 SDF 场与 LiDAR 里程计结合:八叉树体素 embedding + 小 MLP 解码 SDF,动态增量分配体素,无需预训练。核心创新:地面感知 SDF 监督:室外射线常以浅角掠射地面,普通欧氏 SDF 近似失效导致 Z 轴漂移;NeRF-LOAM 对地面点用法向投影距离替代欧氏距离,有效抑制漂移。
MaiCity F-score 77.26% (vs PUMA 68.04%);Newer College F-score 74.37% (vs PUMA 57.27%);Newer College 里程计 RMSE 0.15 m。无需预训练即泛化至 MaiCity / Newer College / KITTI 三个数据集。
2. Key Contributions
- 神经 SDF + 八叉树动态分配:场景无需预知边界;体素顶点存 16 维 embedding,三线性插值 + 2 层 MLP 解码 SDF;Morton 码高效索引
- 地面感知 SDF 监督:地面点用法向投影有符号距离,非地面点用欧氏距离,消除浅角掠射导致的 Z 轴漂移
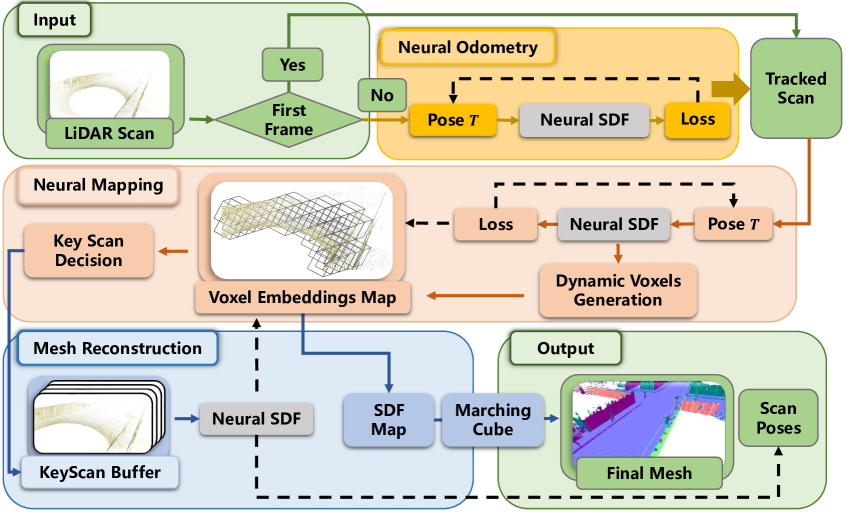
- 三模块流程:神经里程计(固定 embedding 求位姿)→ 神经建图(联合细化 embedding + 位姿)→ 网格重建(key-scan 细化)
- Key-scan 缓冲:维护历史关键扫描防灾难遗忘;key-scan 细化显著提升重建质量
- 无预训练泛化:同一方法在 MaiCity / Newer College / KITTI 三个数据集上无需微调
3. Method
3.1 神经 SDF + 八叉树 embedding
场景 SDF 场:
为体素顶点的 16 维 embedding,三线性插值得到特征后由小解码器 (2 层 FC,256 隐层)预测 SDF 值。 为空白, 为占用, 为表面。
体素管理:八叉树组织空间,Morton 码 (Z-order) 对体素坐标 bit interleaving 生成索引,位移操作快速定位邻接体素(省哈希表搜索);新 LiDAR 点落在未分配区域时动态添加体素(体素边长 0.2 m)。
3.2 地面感知 SDF 监督
室外 LiDAR 以浅入射角打地面 → 欧氏 SDF 近似误差大 → Z 轴漂移。NeRF-LOAM 按地面/非地面分别计算目标 SDF :
为地面法向量(由 Patchwork(同心环区域平面拟合的快速 LiDAR 地面分割算法)地面分割获得), 为最近表面点。法向投影 → 有符号、准确,消融证实去掉地面分离在 Newer College 上直接失败。
3.3 三模块流程
神经里程计:固定 embedding,对当前扫描最小化 SDF 残差,求 6-DoF 位姿;匀速运动模型提供初始化。
神经建图:联合细化体素 embedding + 位姿(BA);维护 key-scan 缓冲:新关键扫描加入条件为新分配体素数超阈值 或距上次 key-scan 距离超 。
网格重建:对最终 SDF 做 Marching Cubes;最后用 key-scan 集全局细化确保一致性。
3.4 损失函数
三项 loss 联合优化 embedding 和位姿:
- :自由空间采样集——射线上距表面较远的点(SDF 应 )
- :表面采样集——射线上靠近 LiDAR 点云表面的点(SDF 应接近真值)
- :神经网络预测 SDF;:目标 SDF(由地面感知模块从 LiDAR 测量推算)
自由空间损失(射线中间点应远离表面,SDF 趋近截断距离 m):
SDF 监督损失(预测 vs 地面感知目标 SDF):
Eikonal 正则(SDF 梯度为单位向量):
Eikonal 条件 是 SDF 的数学定义(真正的符号距离函数的梯度处处为单位向量),强制此约束确保网络输出是合法 SDF 而非任意标量场,有利于表面提取与梯度引导优化。
4. Experiments & Results
数据集
| 数据集 | 类型 | 评估 |
|---|---|---|
| MaiCity | 合成城市 LiDAR | 建图质量 (F-score) + 里程计 |
| Newer College | 真实手持 LiDAR (校园) | 建图质量 + 里程计 |
| KITTI | 真实车载 LiDAR (城市) | 里程计 (8 序列) |
建图质量
MaiCity (10 cm F-score 阈值):
| Method | Acc (cm) ↓ | Comp (cm) ↓ | Chamfer-L1 (cm) ↓ | F-score ↑ |
|---|---|---|---|---|
| PUMA | 7.89 | 9.14 | 8.51 | 68.04% |
| SHINE | 5.75 | 38.45 | — | 67.00% |
| VDBFusion | 4.95 | 46.79 | — | 68.15% |
| NeRF-LOAM | 5.69 | 11.23 | 8.46 | 77.26% |
Newer College (20 cm F-score 阈值):
| Method | Acc (cm) ↓ | Comp (cm) ↓ | Chamfer-L1 (cm) ↓ | F-score ↑ |
|---|---|---|---|---|
| PUMA | 15.30 | 71.91 | 43.60 | 57.27% |
| SHINE | 14.87 | 20.02 | — | 68.85% |
| NeRF-LOAM | 12.89 | 22.21 | 17.55 | 74.37% |
里程计精度
| 数据集 | NeRF-LOAM | PUMA | SuMA |
|---|---|---|---|
| MaiCity00 | 1.27 m | 0.25 m | 2.01 m |
| Newer College | 0.15 m | 0.39 m | 1.22 m |
Newer College (手持 LiDAR,轨迹复杂) 里程计 0.15 m,优于 PUMA 0.39 m。KITTI 8 序列 (00/01/03/04/05/07/09/10) 均验证,其中 seq07 t_rel 1.00%(相对平移 RMSE 百分比,非绝对轨迹误差)。
5. Ablation & Discussion
地面感知 SDF 的必要性 (MaiCity):
| 配置 | RMSE (m) | Newer College |
|---|---|---|
| 无地面分离 | 0.20 | 直接失败 |
| 有地面分离 | 0.17 | 正常运行 |
地面分离是大尺度室外场景的必要条件,尤其浅入射角激光束密集时。
Key-scan 细化贡献 (MaiCity):
| 配置 | Chamfer-L1 (cm) |
|---|---|
| 无 key-scan 细化 | 8.71 |
| 有 key-scan 细化 | 8.46 |
GT 位姿下纯建图 (MaiCity):验证建图模块上限:
| Method | Acc (cm) | F-score |
|---|---|---|
| SHINE | 4.17 | 89.67% |
| VDBFusion | 4.12 | 90.16% |
| NeRF-LOAM | 3.15 | 92.96% |
6. Strengths / Limitations / Future Work
Strengths
- 无需预训练即泛化 MaiCity/Newer College/KITTI 三个差异大的数据集
- 地面感知 SDF 解决室外浅角掠射难题,Newer College 里程计 0.15 m
- F-score 在两大数据集均领先(77.26% / 74.37%)
Limitations
- 不实时:Python 未优化实现;主要瓶颈为射线-体素相交查询
- 无回环闭合,长轨迹漂移不可消
- 依赖 Patchwork 地面分割;复杂地形(坡道、台阶)可能失效
Future Work
- C++/CUDA 实现加速至实时
- 回环检测集成
References
- Deng, J., et al. (2023). NeRF-LOAM: Neural Implicit Representation for Large-Scale Incremental LiDAR Odometry and Mapping. ICCV 2023. arXiv:2303.10709
- 代码: github.com/JunyuanDeng/NeRF-LOAM
- Vox-Fusion 笔记:室内 RGB-D 八叉树 SDF 对照
- LONER 笔记:同期 LiDAR 神经隐式 SLAM,强调实时