K2E-B-G5-1 · Paper Note
iMAP — Implicit Mapping and Positioning
- Description:iMAP 论文笔记 — 首个用单 MLP 实时 RGB-D 神经 SLAM;联合优化网络 + 位姿、损失引导像素采样、信息增益关键帧选择
- My Notion Note ID:K2E-B-G5-1
- Created:2024-03-31
- Updated:2026-06-11
- License:转载欢迎:转载请注明作者 Yu Zhang 并附原文出处(yuzhang.io)
Table of Contents
- 1. Summary
- 2. Key Contributions
- 3. Method
- 4. Experiments & Results
- 5. Ablation & Discussion
- 6. Strengths / Limitations / Future Work
- References
1. Summary
Title: iMAP: Implicit Mapping and Positioning in Real-Time Authors: E. Sucar, S. Liu, J. Ortiz, A. J. Davison Paper: arXiv:2103.12352 (ICCV 2021) Github: 无官方代码
iMAP (Imperial College London, Davison 组, 2021):首个以单 MLP 作为唯一场景表征的实时 RGB-D 神经 SLAM。传统稠密 SLAM 用 TSDF(截断有符号距离场,逐体素存与最近表面的有符号距离的传统稠密表示)/占用栅格存场景,内存随体素分辨率立方增长 (256³ TSDF ≈ 67 MB);iMAP 用一个 4 层 MLP 表示整个场景的体密度和颜色,room-scale 仅需 1 MB,比 TSDF 省 60×。
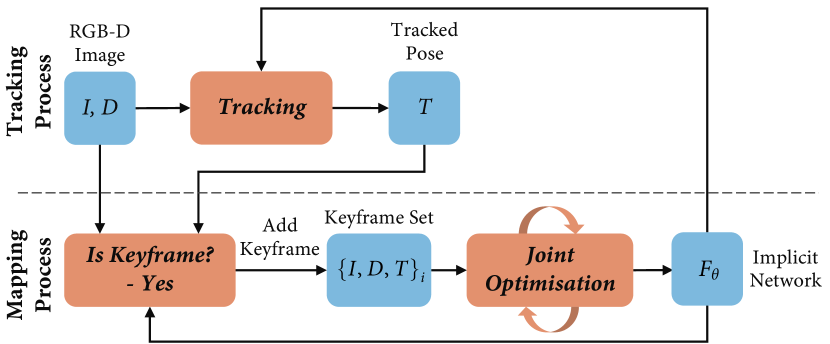
核心思路:把 NeRF 式的隐式表示迁移到在线 SLAM — 网络在帧流中边接收 RGB-D 数据边训练,无预训练;位姿和网络权重联合优化。为实现实时性,引入两项关键机制:损失引导的稀疏像素采样(把 200 像素的预算集中在重建误差大的区域)和信息增益关键帧选择(新帧有显著未观测区域才加入关键帧集)。系统双进程并行:跟踪进程 ~10 Hz,建图进程 ~2 Hz。
Replica 数据集上 completion ratio (79.06%) 比 TSDF fusion (75.09%) 高 4%,在未观测区域补全上有明显优势。ATE RMSE 在 TUM RGB-D 上 2-6 cm,落后于传统方法,但开创了 NeRF-SLAM 方向。
2. Key Contributions
- 首个 MLP-only 实时神经 SLAM:无体素、无点云,单网络既建图又用于跟踪;开创 NeRF-SLAM 方向
- 极省内存:room-scale 1 MB vs. TSDF 256³ 67 MB,省 60×;连续隐式表示可平滑补全未观测区
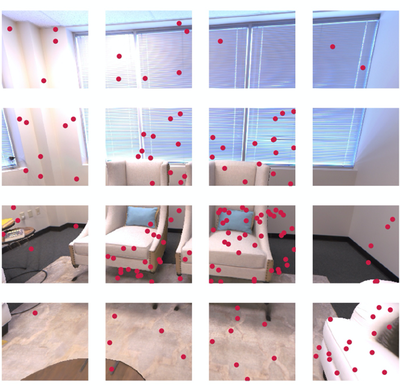
- 损失引导稀疏采样 (§3.4):图像分 8×8=64 格,200 像素按格内损失分配,把计算集中在高信息量区域
- 信息增益关键帧选择 (§3.5):归一化深度误差大的区域过多时才加关键帧;room-scale 只需 10-14 帧
- 联合优化:跟踪/建图分离双进程,分别优化位姿 (固定网络) 和网络+位姿 (关键帧集)
3. Method
3.1 MLP 场景表征
单个 4 层 MLP,输入 3D 点 经高斯位置嵌入后,输出颜色 和体密度 :
位置嵌入:高斯 Fourier 特征 , 从 采样,,嵌入维度 。高斯嵌入帮助 MLP 学习高频细节(坐标归一化到 )。
网络结构:4 hidden layers × 256 units,输出两个头 (颜色 3 维 + 密度 1 维),参数量 ~1 MB。与原始 NeRF 不同:无视角方向输入(室内 RGB-D 场景简化),且在线训练无预训练。
3.2 体渲染
沿光线均匀采样 点(粗采 32 + 细采 12),体密度转占用:
为采样间距。射线终止权重(类 NeRF 的 -合成):
加权得渲染深度和颜色:
深度方差用于加权几何损失,降低不确定区域 (如遮挡边缘) 的影响:
大的像素 → 深度估计不确定 → 在损失中降权。
3.3 联合优化损失
光度 + 几何 L1 损失联合优化网络参数 和关键帧位姿 :
光度损失(渲染颜色 vs. RGB 观测,L1):
几何损失(渲染深度 vs. 深度观测,按深度方差归一化):
联合目标:
为采样像素总数(跨关键帧),优化器 Adam。
3.4 损失引导像素采样
全图所有像素逐一渲染开销过大。iMAP 把图像分为 格,每格按平均 loss 分配采样预算:
为第 格内的平均损失, 为该格的采样概率。每次迭代共采 200 像素,按概率分配到各格 → 计算集中在重建差的区域。
3.5 关键帧选择
新帧检测:计算归一化深度误差超过阈值 的像素比例 ;若 (即有 35%+ 像素深度误差大)→ 加入关键帧集。
维护大小为 的滑动关键帧窗口(包含最新帧、当前帧和 3 个高 loss 历史帧),避免内存无限增长。room-scale Replica 平均每场景 ~13 个关键帧。
3.6 双进程实时系统
类 PTAM(Parallel Tracking and Mapping,最早将跟踪与建图解耦为双线程的经典 SLAM,Klein & Murray 2007)/ORB-SLAM 的跟踪-建图分离:
| 进程 | 频率 | 固定 | 优化 |
|---|---|---|---|
| 跟踪 | ~10 Hz | 网络 | 当前帧位姿 |
| 建图 | ~2 Hz | — | 网络 + 关键帧位姿 |
两进程共享网络权重,通过锁同步;建图进程联合优化全局一致性,跟踪进程利用最新网络状态估计位姿。
4. Experiments & Results
数据集
| 数据集 | 场景 | 评估内容 |
|---|---|---|
| Replica | 8 (room-0 |
重建质量 (accuracy, completion, completion ratio) |
| TUM RGB-D | fr1/desk, fr2/xyz, fr3/office | 跟踪精度 (ATE RMSE) |
| Azure Kinect (real) | 多种室内/室外 | 定性验证 |
Replica 重建质量
| Metric | iMAP | TSDF Fusion |
|---|---|---|
| Accuracy (cm) ↓ | 4.43 | 3.45 |
| Completion (cm) ↓ | 5.56 | 6.63 |
| Completion Ratio (%) ↑ | 79.06 | 75.09 |
| Memory (MB) ↓ | 1.04 | 67.10 |
iMAP 补全率高 4%(MLP 可外推未观测区),精度略低(过平滑)。
TUM RGB-D 跟踪精度 (ATE RMSE, cm)
对比方法:BAD-SLAM(基于 surfel 的稠密 RGB-D SLAM,Schöps 2019)、Kintinuous(TSDF 流式融合稠密 SLAM,Whelan 2012)、ORB-SLAM2(稀疏 ORB 特征点 SLAM):
| Sequence | iMAP | BAD-SLAM | Kintinuous | ORB-SLAM2 |
|---|---|---|---|---|
| fr1/desk | 4.9 | 1.7 | 3.7 | 1.6 |
| fr2/xyz | 2.0 | 1.1 | 2.9 | 0.4 |
| fr3/office | 5.8 | 1.73 | 3.0 | 1.0 |
iMAP 跟踪精度落后传统方法,但作为首个 MLP-only 神经 SLAM 仍有参考意义。

5. Ablation & Discussion
论文在 Replica office-2 上消融网络宽度和关键帧窗口大小:
网络宽度(建图质量 vs. 速度):
| 宽度 | 跟踪时间 (ms) | 建图时间 (ms) | Comp. Ratio (%) |
|---|---|---|---|
| 128 | 80 | 357 | 75.79 |
| 256 | 101 | 448 | 77.22 |
| 512 | 173 | 777 | 76.91 |
宽度 256 为最优平衡点,512 已出现性能饱和。
关键帧窗口大小:
| W | 跟踪 (ms) | 建图 (ms) | Comp. Ratio (%) |
|---|---|---|---|
| 3 | 84 | 373 | 75.82 |
| 5 | 144 | 647 | 77.22 |
| 10 | 144 | 678 | 77.35 |
与 质量相当,选 5 以控制计算量。
论文未做损失引导采样的定量消融,仅定性说明优于随机采样。
6. Strengths / Limitations / Future Work
Strengths
- 首个 MLP-only 实时神经 SLAM,内存仅 1 MB (vs. TSDF 67 MB)
- 隐式连续表示天然支持未观测区补全,Replica 补全率比 TSDF 高 4%
- 开创 NeRF-SLAM 方向,后续 NICE-SLAM、iMAP 改进系列 均以此为基础
Limitations (后续工作解决)
- 灾难性遗忘:单 MLP 容量有限,场景变大时旧区域信息被覆盖 → NICE-SLAM 用局部特征网格解决
- 过平滑:MLP 容量不足难以表示高频细节,精度 (4.43 cm) 差于 TSDF (3.45 cm)
- 全局更新低效:每次建图更新整个网络;大场景代价线性增长
- 跟踪精度落后传统方法 (ORB-SLAM2 fr2/xyz 0.4 cm vs. iMAP 2.0 cm)
- 仅 RGB-D,无单目/立体支持;无回环闭合
Future Work
- 局部化表示 → 解决遗忘和扩展性(见 NICE-SLAM)
- 更紧凑/高效的采样策略;回环检测集成
References
- Sucar, E., Liu, S., Ortiz, J., & Davison, A. J. (2021). iMAP: Implicit Mapping and Positioning in Real-Time. ICCV. arXiv:2103.12352
- 项目页: edgarsucar.github.io/iMAP
- NeRF 笔记:体渲染基础
- NICE-SLAM 笔记:iMAP 直接升级版,解决遗忘和过平滑问题
- Davison (2018). FutureMapping — 隐式 SLAM 思想来源
- Mildenhall et al. (2020). NeRF (ECCV):体渲染表示基础