K2E-B-G5-7 · Paper Note
NICER-SLAM
- Description:NICER-SLAM 论文笔记 — NICE-SLAM 的纯 RGB 版,单目深度/法向/光流先验监督 + SDF 分层表示,实现媲美 RGB-D 的稠密重建
- My Notion Note ID:K2E-B-G5-7
- Created:2024-03-31
- Updated:2026-06-08
- License:转载欢迎:转载请注明作者 Yu Zhang 并附原文出处(yuzhang.io)
Table of Contents
- 1. Summary
- 2. Key Contributions
- 3. Method
- 4. Experiments & Results
- 5. Ablation & Discussion
- 6. Strengths / Limitations / Future Work
- References
1. Summary
Title: NICER-SLAM: Neural Implicit Scene Encoding for RGB SLAM Authors: Z. Zhu, S. Peng, V. Larsson, Z. Cui, M. R. Oswald, A. Geiger, M. Pollefeys Paper: arXiv:2302.03594 (3DV 2024) Github: cvg/nicer-slam
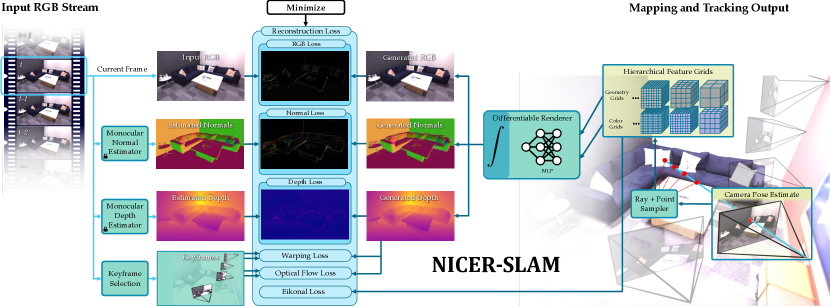
NICER-SLAM (ETH Zürich + Tübingen, NICE-SLAM 原班人马, 2023):把 NICE-SLAM 推到纯 RGB (单目),去掉深度相机依赖。单目三大难:深度歧义、优化难收敛、无尺度观测。对策:用易获取的单目几何先验(Omnidata 单目深度/法向 + GMFlow 光流)作额外监督约束,同时把 NICE-SLAM 的占用表示升级为分层 SDF,并引入局部自适应 SDF→密度转换提升收敛稳定性。
场景表示:coarse 几何 32³ 网格(基础 SDF)+ fine 多分辨率网格(8 层,32→128,残差 SDF)+ 颜色多分辨率网格(16 层,16→2048)。系统端到端联合优化位姿与场景,无需预训练跟踪模块。
Replica 数据集 (RGB 输入) 重建精度 3.65 cm、法向一致性 90.27%、ATE 1.88 cm,持平或超过部分 RGB-D 方法;新视角合成 PSNR 23.93 dB 超过 NICE-SLAM (RGB-D) 的 23.26 dB。
2. Key Contributions
- 纯 RGB 稠密 SLAM:无深度传感器;首个媲美 RGB-D NICE-SLAM 重建质量的单目神经隐式系统
- 单目几何先验监督:Omnidata 单目深度 (仿射对齐) + 法向 + GMFlow 光流,作为弱监督约束深度歧义
- 分层 SDF 表示:取代 NICE-SLAM 的占用,SDF 几何更清晰;coarse (base) + fine (残差) 两级
- 局部自适应 SDF→密度: 参数随体素观测次数自适应 (Eq. 9),观测充分区锐化,稀疏区平滑,收敛更稳
- Warping 损失:当前帧渲染深度 unproject 后投影至邻关键帧,约束多视图几何一致性
3. Method
3.1 分层 SDF 表示
什么是 SDF:符号距离函数 (Signed Distance Function) 给空间任一点 赋一个标量 —— 该点到最近表面的带符号距离,物体外为正、内为负,零等值面 就是重建出的表面。相比 NICE-SLAM 用的占用 (occupancy) 概率,SDF 处处给出到表面的连续距离,表面定义更锐、法向可由梯度 直接求,且能用 Eikonal 正则 (,§3.3) 约束成合法的距离场。
NICER-SLAM 把 SDF 拆成 coarse 基础 + fine 残差两级,各由一套特征网格 + 小 MLP 解码 ( 为位置编码, 为对应网格在 处的插值特征):,。
| 层 | 网格结构 | 特征维度 | 解码器 | 输出 |
|---|---|---|---|---|
| Coarse 几何 | 32³ 密集格 | 32 维 | 1 隐层 64 维 | 基础 SDF |
| Fine 几何 | 多分辨率 8 层 (32→128) | 4 维/层 | 3 隐层 64 维 | 残差 SDF |
| 颜色 | 多分辨率 16 层 (16→2048) | 2 维/层 | 2 隐层 64 维 | 颜色 |
为什么分两级 (base + 残差):
- coarse 基础 SDF —— 来自 密集网格,容量小、只能表达平滑的全局几何轮廓,负责"大形状",保证优化早期就有合理的粗几何 (§3.5 先只优化 coarse 层)。
- fine 残差 SDF —— 来自多分辨率网格 (32→128),在 coarse 之上只学高频细节修正量。
- 最终 SDF 为两者相加:
fine 网络只需拟合"差量"而非从零重建整个场,优化更易收敛、伪影更少。颜色 MLP 输入位置、表面法向、视角方向及几何特征。
3.2 单目几何先验
用现成网络产出伪监督,弥补缺深度:
- 单目深度 (Omnidata):含尺度/平移歧义 → 每帧学可学参数 做仿射对齐
- 单目法向 (Omnidata):约束表面朝向,角度 + L1 双约束
- 光流 (GMFlow):相邻帧像素运动一致性约束
3.3 损失函数
六项 loss 加权组合:
- :渲染颜色 vs. 观测 L1
- :当前帧 unproject 后投影至邻帧的 RGB L1(多视图几何一致)
- :帧间像素位移 vs. GMFlow 预测 L1
- :仿射对齐后单目深度 vs. 渲染深度 L2;
- :渲染法向 vs. 单目法向(L1 + 角度 L1)
- :Eikonal 正则 ,约束 SDF 梯度为单位向量
3.4 局部自适应 SDF→密度
体渲染需要密度 ,NICER-SLAM 用 VolSDF 的变换把 SDF 转成密度 (Eq. 6;等价于尺度 、零均值的 Laplacian 分布 CDF):
控制零等值面附近密度的"陡峭程度": 时密度在表面处突变 (表面锐利), 大则平滑过渡 (利于早期优化、但表面糊)。NICER-SLAM 进一步让 不取全局固定值,而按体素观测次数 自适应:
,,; 为建图过程中 体素内累积的点采样次数(采样越多表明该区域被充分观测)。观测充分 ( 大) → 小,表面锐利;观测稀疏 → 大,保持平滑。消融表明固定 相比最优自适应 ATE 升至 3.81-3.98 cm(自适应为 2.01 cm)。
3.5 建图与跟踪
建图三阶段(关键帧 16 帧:5 随机 + 10 最近 20 帧中选 + 当前帧):
- 0–25% 步:只优化 coarse 几何 + 颜色
- 25–75% 步:coarse + fine 几何 + 颜色
- 75–100% 步:局部 BA,16 帧中冻结距当前帧较远的 8 帧位姿,仅优化另外 8 帧位姿 + 全场景,每次 8096 像素
跟踪:仅用 RGB ,每步 1024 像素,100 次迭代优化当前帧位姿。
4. Experiments & Results
数据集
| 数据集 | 说明 | 评估内容 |
|---|---|---|
| Replica | 8 合成室内场景,RGB 输入 | 重建质量 + 跟踪 + 新视角合成 |
| 7-Scenes | 7 真实室内场景,RGB | 跟踪 ATE |
Replica 结果
| Method | 输入 | Acc (cm) ↓ | Comp (cm) ↓ | Comp Ratio (%) ↑ | Normal Cons. (%) ↑ |
|---|---|---|---|---|---|
| NICE-SLAM | RGB-D | 3.87 | 3.87 | 82.41 | 89.93 |
| Vox-Fusion | RGB-D | 2.67 | 4.55 | 86.59 | 91.73 |
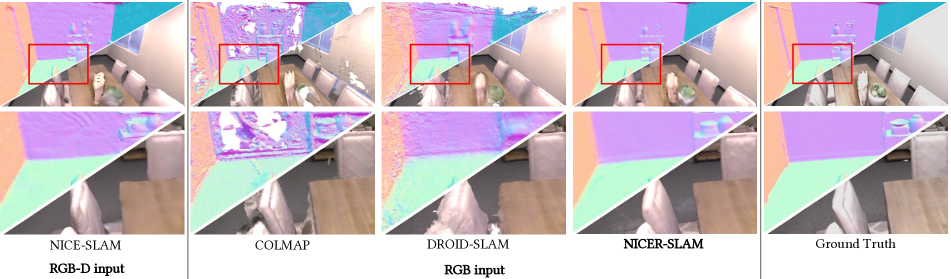
| COLMAP | RGB | 8.69 | 12.12 | 67.62 | 70.13 |
| DROID-SLAM | RGB | 5.50 | 12.29 | 63.62 | 76.59 |
| NICER-SLAM | RGB | 3.65 | 4.16 | 79.37 | 90.27 |
新视角合成 (extrapolation):NICER-SLAM 23.93 dB / 0.857 / 0.201 vs. NICE-SLAM 23.26 / 0.844 / 0.216。
跟踪 ATE:NICER-SLAM 1.88 cm vs. NICE-SLAM 1.95 cm (RGB-D)、DROID-SLAM 0.33 cm (RGB)。
7-Scenes 跟踪 ATE (cm 平均)
| NICE-SLAM | Vox-Fusion | DROID-SLAM | NICER-SLAM |
|---|---|---|---|
| 6.33 | 4.74 | 5.66 | 8.55 |
7-Scenes 上跟踪精度落后,论文指出无回环闭合是主要原因。
5. Ablation & Discussion
组件消融 (Replica office-4):
| 配置 | ATE (cm) | Acc (cm) | Comp Ratio (%) |
|---|---|---|---|
| w/o 颜色网格 | 9.92 | 8.32 | 50.13 |
| w/o coarse 网格 | 3.07 | 4.51 | 67.29 |
| Full NICER-SLAM | 2.01 | 3.03 | 83.98 |
SDF→密度转换消融 (office-4):
| 配置 | ATE (cm) | Acc (cm) | Comp Ratio (%) |
|---|---|---|---|
| 固定 | 3.81 | 7.77 | 39.48 |
| 固定 | 3.98 | 3.48 | 76.67 |
| 全局可学 | 2.62 | 3.64 | 76.35 |
| 体素 | 3.00 | 3.19 | 81.90 |
| 体素 (最优) | 2.01 | 3.03 | 83.98 |
- 颜色网格去掉后退化最大 (ATE 9.92 cm);coarse 层对补全率贡献明显
- 局部自适应 优于任何固定值; 体素为最优粒度
6. Strengths / Limitations / Future Work
Strengths
- 首个纯 RGB 神经隐式 SLAM,重建质量持平/超越部分 RGB-D 系统
- 分层 SDF + 单目先验组合,无需专用硬件
- 新视角合成质量超过 NICE-SLAM
Limitations
- 不实时:A100 上每次建图迭代 496 ms,远低于实时要求
- 无回环闭合:长轨迹存在漂移,7-Scenes ATE 8.55 cm 落后
- 单目几何先验质量依赖 Omnidata/GMFlow 网络,极端场景(遮挡重、弱纹理)可能退化
Future Work
- 回环闭合集成
- 加速至实时
- 泛化至室外/动态场景
References
- Zhu, Z., et al. (2023). NICER-SLAM: Neural Implicit Scene Encoding for RGB SLAM. 3DV 2024. arXiv:2302.03594
- 前作: NICE-SLAM 笔记:本文直接升级目标
- Eftekhar et al. (2021). Omnidata — 单目深度/法向估计网络
- Xu et al. (2022). GMFlow — 光流估计网络
- Yu et al. (2022). MonoSDF — 类似单目先验用于 SDF 重建
- Yariv et al. (2021). VolSDF: Volume Rendering of Neural Implicit Surfaces. NeurIPS. — §3.4 SDF→密度变换 (Laplacian CDF) 出处
- NeRF 笔记:体渲染基础