K2E-B-W1-4 · Paper Note
VINS on Wheels
- Description:VINS on Wheels 论文笔记 — 地面车辆 VINS 可观性退化分析(恒加速/无旋转多出不可观方向)、引入轮速里程计恢复尺度可观性、mVINS 利用平面运动软约束,Pioneer 3DX + Project Tango 真机验证
- My Notion Note ID:K2E-B-W1-4
- Created:2023-08-23
- Updated:2026-06-11
- License:转载欢迎:转载请注明作者 Yu Zhang 并附原文出处(yuzhang.io)
Table of Contents
- 1. Summary
- 2. Key Contributions
- 3. Method
- 4. Experiments & Results
- 5. Ablation & Discussion
- 6. Strengths / Limitations / Future Work
- References
1. Summary
Title: VINS on Wheels Authors: Kejian J. Wu, Chao X. Guo, Georgios Georgiou, Stergios I. Roumeliotis (UMN MARS Lab) Paper: ICRA 2017(DOI 10.1109/ICRA.2017.7989603) Github: 无官方代码
本论文研究地面车辆上 VINS 的可观性问题。核心发现:VINS 在车辆受限运动(直线匀加速 / 圆弧匀速)下除标准 4 个不可观 DOF(3 平移 + yaw)外还会多出额外不可观方向,导致尺度估计失准。
论文提出两类修正:(1) 加入轮速里程计,使尺度方向恢复可观;(2) mVINS,把车辆近似平面运动表述为随机软约束纳入估计。Pioneer 3DX 机器人 + Project Tango 平板(MEMS IMU + 相机)真机实验验证了理论预测和精度提升。
2. Key Contributions
- 可观性分析:解析推导 VINS 在恒加速度 / 无旋转两种受限运动下的额外不可观方向(零空间),给出严格定理及证明
- VINS + 里程计:融合低频轮速编码数据,证明尺度方向恢复可观(定理 3),并以鲁棒方式(2D 位移融合)处理噪声轮速
- mVINS:把近似平面运动约束 表述为随机(软)约束加入代价函数,比确定性约束更鲁棒(对路面颠簸有容错)
- 方法通用,与具体滤波 / 优化估计器无关
3. Method
3.1 VINS 状态与观测
状态向量(含 个地标):
:global→IMU 四元数;:bias;:速度、位置;:地标。
IMU 测量(Eq 2)及相机观测(Eq 4)遵循标准 VINS 形式(见 VIO 预积分 + MSCKF 笔记)。
3.2 可观性退化:定理 1 — 恒加速度
恒定局部加速度条件:
定理 1:线性化 VINS 在条件 (2) 下,除 4 个标准不可观方向外,多出尺度方向(对应零空间列向量 ):
物理意义:恒加速度时无法区分真实 body 加速度的大小与加速度计 bias 的幅值 → 尺度模糊。
3.3 可观性退化:定理 2 — 无旋转
无旋转条件:,。
定理 2:VINS 在无旋转下多出与全部 3 个 orientation DOF 相关的额外不可观方向(对应零空间 ),不只是 yaw。
物理意义:无旋转时无法区分局部重力方向和加速度计 bias → roll/pitch 也退化(全部 orientation 不可观)。
3.4 VINS with Odometer
轮速编码器提供左右轮角速度 ,换算为线速度 和角速度 :
:左右轮半径;:轴距(均离线批量最小二乘标定)。
定理 3:给定里程计测量 (4),(3) 中的尺度方向变为可观。
实现:把原始轮速积分为相邻 odometer 帧间的 2D 位移。设里程计在帧 到 之间给出旋转增量 (偏航角,Eq 15 残差形式)和平移增量 (地面平面 2D 位移,Eq 17 残差形式)。
- Eq 15(旋转残差):(里程计偏航增量 vs IMU 积分偏航增量之差,投影到里程计系 yaw 分量)。
- Eq 17(平移残差):(里程计 2D 平移增量 vs IMU 积分位移差投影到地面平面之差)。
两个残差通过滤波器更新对状态施加约束,恢复尺度可观性;odometer-IMU 外参离线标定,相机-IMU 外参在线估计。
3.5 mVINS — 流形约束
平面运动约束( 系坐标轴与平面法向)参数化为 2-DOF 四元数 + 标量 ,约束函数:
符号::里程计坐标系(地面平面系,z 轴朝上);:从 IMU 坐标系 到里程计系 的旋转矩阵(离线标定外参的一部分),取前 2 行,将 3D 向量投影到地面平面;; 为当前重力方向对应的旋转矩阵估计; 为 IMU 在里程计坐标系 中的位置(由里程计 2D 位移积分); 为从全局坐标系 到里程计系 的旋转矩阵(离线标定)。第 1 块()= roll / pitch 为零约束;第 2 块(标量)= z 轴位移为零约束。
随机(软)约束版本(VOS):把 建模为零均值高斯过程,加入代价函数额外项 ,用 Mahalanobis 距离检测并临时去掉不满足约束的时刻(如过减速带)。比确定性约束(VOD)更鲁棒。
4. Experiments & Results
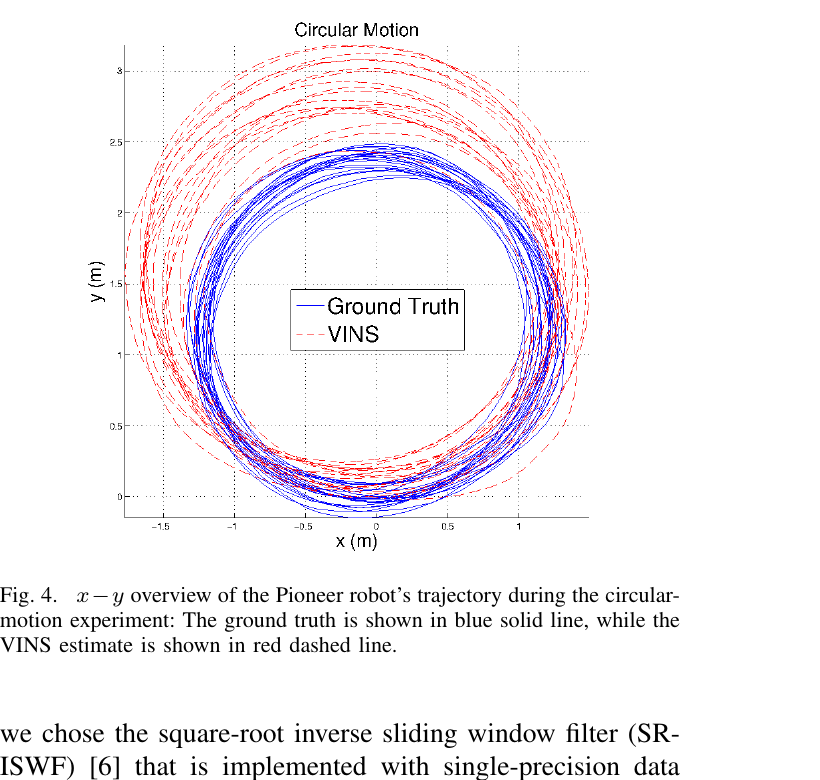
平台:Pioneer 3 DX 机器人(轮速 10 Hz)+ Project Tango 平板(MEMS IMU 100 Hz, 灰度相机 640×480 @ 30 Hz);NVIDIA Tegra K1 CPU(2.3 GHz 四核)+ 4 GB RAM。
前端:200 FAST 角点 + KLT 光流 + 2-pt RANSAC。
后端:SR-ISWF(Square-Root Inverse Sliding Window Filter,平方根逆形式滑动窗口滤波器,用平方根信息矩阵代替协方差矩阵以提升数值稳定性),滑窗 15 poses,~7 Hz。
运动影响验证(定理 1/2 实验证明)
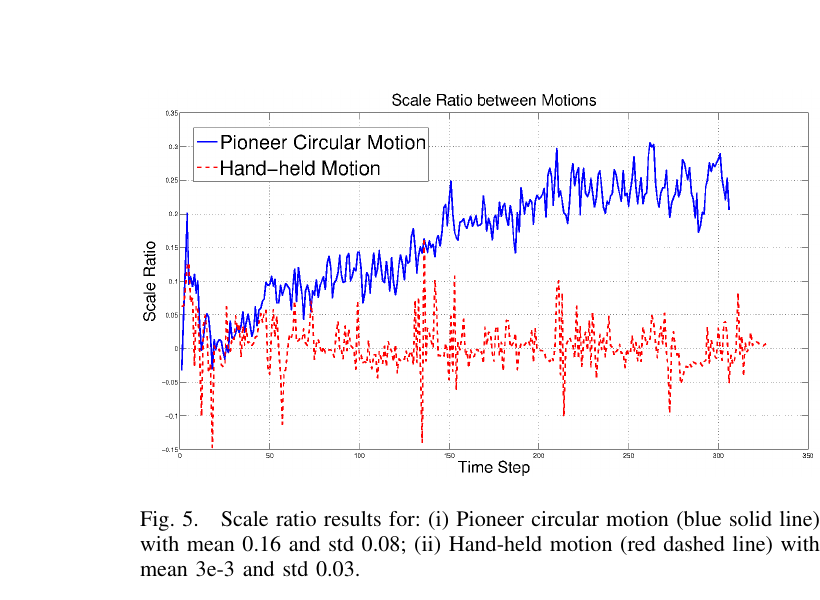
尺度比 (越接近 0 越好):
| 运动类型 | SR 均值 | SR 标准差 | 位置 RMSE |
|---|---|---|---|
| Pioneer 圆弧运动(恒加速,符合定理 1) | 0.16 | 0.08 | 81 cm |
| 手持通用运动(无受限运动) | 0.003 | 0.03 | 14 cm |
圆弧运动 SR 持续漂移,手持运动 SR 在零附近振荡 → 验证定理 1。
系统性能(5 个数据集,各约 1 km 室内建筑)
四种配置比较(Table I,RMSE in meters for x-y / z / total,+ % of distance):
- VINS(仅 VINS,无里程计无平面约束):最弱基线,大漂移
- VO(VINS + 里程计,无平面约束):x-y 改善明显,尺度恢复可观
- VOD(VINS + 里程计 + 确定性平面约束):z 轴有约束;但确定性约束在路面颠簸时反而有负面影响
- VOS(VINS + 里程计 + 随机平面约束):全方位最优,x-y 和 z 均显著改善
效率:整个 VINS pipeline 68 ms / 关键帧(其中 SR-ISWF 36 ms);里程计 + 平面约束各 < 1 ms;总 CPU ~50%(7 Hz 运行)。
5. Ablation & Discussion
- 定性 vs 随机约束(VOD vs VOS):确定性约束( 硬约束)在完全平坦路面最优,但路面颠簸时强制约束引入错误信息 → z 轴反而变差。VOS 软约束通过 Mahalanobis 检测自动跳过不满足时刻,更鲁棒
- 里程计内参标定:论文做离线批量最小二乘(融合视觉 + 惯性 + 里程计),运行时当已知量固定;相机-IMU 外参在线估计。标定精度对里程计融合效果影响显著
- 运动依赖性:特殊运动(直线/圆弧)在实际中总是"近似"满足——只要车辆稍微加速变化就会周期性地信息恢复,但在"近似满足"期间 Hessian 矩阵严重病态,仍会显著降级精度
6. Strengths / Limitations / Future Work
优点:
- 理论严格:给出可观性退化的解析证明和精确零空间表达式
- 方法通用(滤波 / 优化估计器均适用)
- 随机平面约束对路面不平坦有显式容错机制
局限:
- 里程计需离线标定(轮半径 + 轴距),换轮胎或磨损后需重新标定
- mVINS 平面假设不适用于阶梯 / 多楼层场景
- 无回环(纯里程计);轮子打滑时里程计测量退化(论文 future work 提出补偿方案)
后续工作(论文展望):
- 扩展 mVINS 到多平面间移动(上楼梯)
- 补偿轮胎打滑(wheel slippage compensation)
References
| 类别 | 链接 |
|---|---|
| 论文 | Wu K.J., Guo C.X., Georgiou G., Roumeliotis S.I. (2017). VINS on Wheels. ICRA. PDF |
| 可观性基础 | Hesch J.A. et al. (2014). Camera-IMU-Based Localization: Observability Analysis and Consistency Improvement. IJRR. |
| 相关 | 可观性 / FEJ 见 VIO 滑窗优化;轮速融合见 K2E-B-W Wheel Odometry 系列 |