K2E-B-G5-5 · Paper Note
Orbeez-SLAM
- Description:Orbeez-SLAM 论文笔记 — ORB-SLAM2 跟踪 + Instant-NGP 建图,稀疏地图点初始化密度栅格,无需预训练的实时单目稠密 SLAM
- My Notion Note ID:K2E-B-G5-5
- Created:2024-03-31
- Updated:2026-06-11
- License:转载欢迎:转载请注明作者 Yu Zhang 并附原文出处(yuzhang.io)
Table of Contents
- 1. Summary
- 2. Key Contributions
- 3. Method
- 4. Experiments & Results
- 5. Ablation & Discussion
- 6. Strengths / Limitations / Future Work
- References
1. Summary
Title: Orbeez-SLAM: A Real-time Monocular Visual SLAM with ORB Features and NeRF-realized Mapping Authors: C.-M. Chung, Y.-C. Tseng, Y.-C. Hsu, X.-Q. Shi, Y.-H. Hua, J.-F. Yeh, W.-C. Chen, Y.-T. Chen, W. H. Hsu Paper: arXiv:2209.13274 (ICRA 2023) Github: MarvinChung/Orbeez-SLAM
Orbeez-SLAM (台湾大学, 2022):"经典 SLAM 跟踪 + 神经渲染建图"的代表性拼装系统。把成熟的 ORB-SLAM2 前端(稀疏特征点 + BA)当跟踪模块,把 Instant-NGP(多分辨率哈希编码的实时 NeRF,Müller 2022)当建图模块。卖点:无需预训练、实时(20+ FPS)、单目 RGB 即可产稠密辐射场地图。
关键设计:ORB-SLAM2 三角化的稀疏地图点不监督 NeRF,而是用来初始化 Instant-NGP 的密度栅格——标记出可能是表面的体素,引导自适应采样,大幅加速 NeRF 收敛。位姿仅由重投影误差优化(不用光度/深度梯度反传),保证实时性与稳定性。
TUM RGB-D ATE: fr1/desk 1.9 cm、fr2/xyz 0.3 cm、fr3/office 1.0 cm;Replica Depth L1 11.88 cm / PSNR 29.25 dB;速度 ~20 FPS (RTX 3090,vs. NICE-SLAM 的 0.056 FPS,快约 360-800×)。
2. Key Contributions
- 解耦跟踪与建图:ORB-SLAM2 负责稳健位姿估计,Instant-NGP 负责稠密地图,两者并行解耦
- 稀疏地图点引导密度初始化:三角化地图点 → 标记体素密度 → 加速 NeRF 在表面附近的采样收敛,无需 RGB-D 深度
- 位姿优化策略:位姿仅用重投影误差优化(消融显示联合光度优化 ATE 从 0.8 cm 升至 5.3 cm)
- 无预训练:Instant-NGP 在线训练,不需要 NICE-SLAM 的 ConvONet(卷积占用网络,将空间特征网格解码为占用概率的预训练解码器)预训练解码器
- 实时性:20+ FPS,比 iMAP/NICE-SLAM 快 2-3 个数量级
3. Method
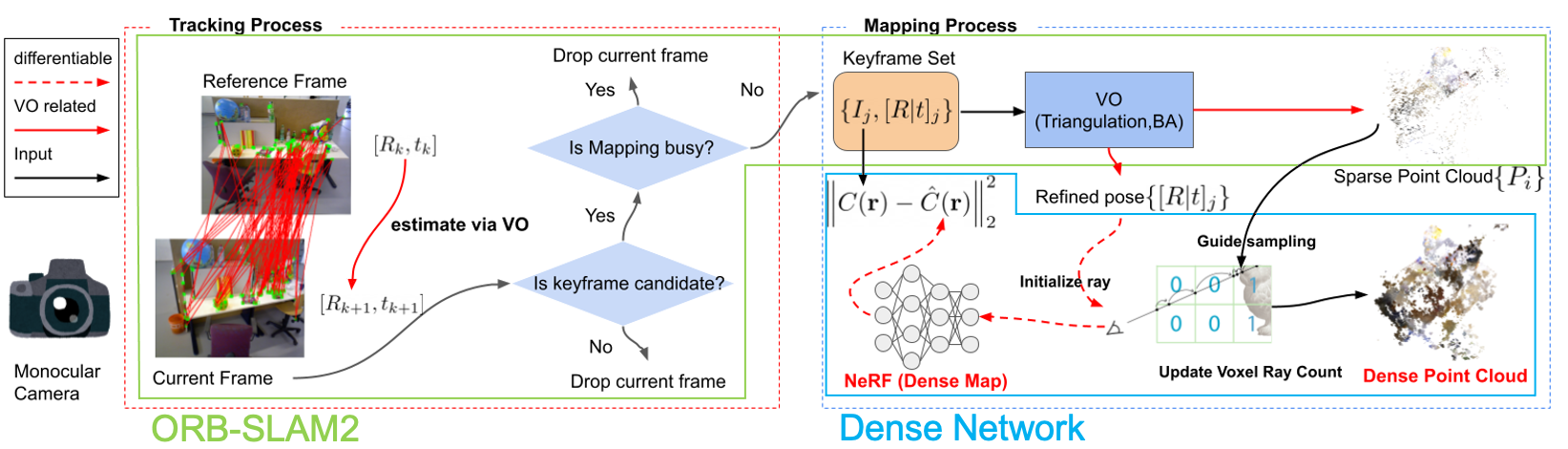
3.1 双线程架构
两个并行线程协作:
| 线程 | 功能 |
|---|---|
| 跟踪线程 (ORB-SLAM2) | ORB 特征提取 → 匹配 → 位姿估计 → 局部 BA → 关键帧 + 稀疏地图点 |
| 建图线程 (Instant-NGP) | 关键帧 RGB + 位姿 → 光度 L2 损失 → 辐射场训练;稀疏点仅初始化密度栅格 |
ORB-SLAM2 优化好的位姿直接喂给 NeRF,绕开 NeRF 自己估位姿的不稳定问题。关键帧基于跟踪质量和建图进程可用性选取。
3.2 稀疏地图点初始化密度栅格
核心设计(论文强调"NeRF 从不被 GT 深度监督"):
ORB-SLAM2 三角化的稀疏地图点 用于:
- 标记 所在 Instant-NGP 体素为高密度候选(自适应采样计数器 +1)
- 体素采样计数 > 阈值 (64) → 标记为可能表面 → 自适应采样时在该区域多采
- 密度低的空体素跳过不采(skip-voxel 策略)→ 减少渲染开销
效果:表面附近收敛快;空旷区域不浪费计算。NeRF 本身完全由光度损失训练,稀疏点只作几何引导。
3.3 损失函数与位姿优化
辐射场训练损失(光度 L2):
为关键帧 中像素 出发的光线; 为观测颜色; 为 Instant-NGP 体渲染颜色(沿射线离散积分):
:第 采样点体密度;:采样间距;:该点颜色;:到达第 点的累积透射率。纯单目光度监督(无深度 GT)。
位姿优化:仅通过 ORB-SLAM2 的重投影误差优化,不反传光度/深度梯度到位姿。消融显示这一设计至关重要(见 §5)。
4. Experiments & Results
数据集
| 数据集 | 评估 | 输入 |
|---|---|---|
| TUM RGB-D | ATE RMSE | 单目 RGB |
| ScanNet (6 场景) | ATE | 单目 RGB |
| Replica (room-0 等) | Depth L1, PSNR | 单目 RGB |
TUM RGB-D 跟踪精度 (ATE RMSE, cm)
| Sequence | iMAP | NICE-SLAM | Orbeez-SLAM | ORB-SLAM2 |
|---|---|---|---|---|
| fr1/desk | 4.9 | 2.7 | 1.9 | 1.6 |
| fr2/xyz | 2.0 | 1.8 | 0.3 | 0.3 |
| fr3/office | 5.8 | 3.0 | 1.0 | 0.9 |
跟踪精度接近 ORB-SLAM2(仅纯跟踪)。
ScanNet 平均 ATE (6 场景, cm)
| ORB-SLAM2 | NICE-SLAM | Orbeez-SLAM |
|---|---|---|
| 9.15 | 9.63 | 8.655 |
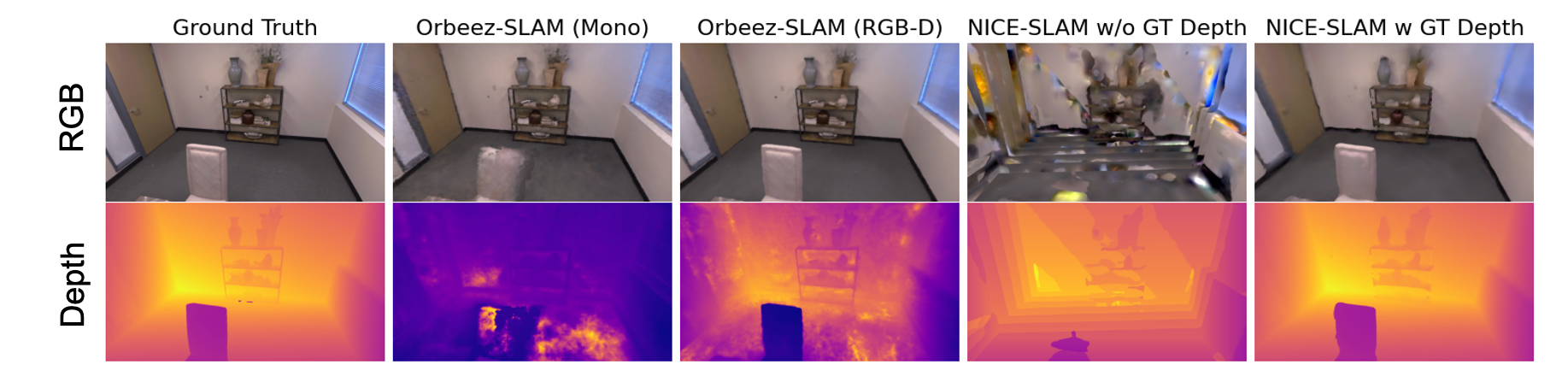
Replica 重建质量
| Method | Depth L1 (cm) ↓ | PSNR (dB) ↑ |
|---|---|---|
| NICE-SLAM (无 GT 深度) | 13.49 | 17.74 |
| Orbeez-SLAM | 11.88 | 29.25 |
速度对比 (FPS)
| Sequence | NICE-SLAM | Orbeez-SLAM |
|---|---|---|
| fr1/desk | 0.056 | 19.210 |
| fr2/xyz | 0.028 | 22.725 |
| fr3/office | 0.037 | 21.542 |
Orbeez-SLAM 比 NICE-SLAM 快约 360-800×。
5. Ablation & Discussion
位姿优化策略消融:
| 位姿优化方式 | ATE (cm) |
|---|---|
| 仅重投影误差 (本方法) | 0.8 |
| 联合光度损失 | 5.3 |
→ 光度损失反传到位姿会严重降低跟踪精度(6.6×)。原因:NeRF 早期训练质量差,光度梯度不可靠,拉偏位姿。
密度初始化意义:稀疏点引导采样让 Instant-NGP 更快收敛至表面,特别是稀疏/弱纹理区域;无初始化时 NeRF 需更长时间找到表面。
6. Strengths / Limitations / Future Work
Strengths
- 实时 20+ FPS,比 iMAP/NICE-SLAM 快 2-3 个数量级
- 无预训练、无深度传感器,部署门槛低
- 跟踪精度接近纯 ORB-SLAM2,并产出额外稠密辐射场地图
Limitations
- ScanNet 等大规模多房间场景表现下降(论文承认为难点)
- Instant-NGP 单一整体表示,大场景可能内存/质量受限
- 无回环闭合(对应 GO-SLAM 的解法)
Future Work (论文)
- 大规模多房间场景扩展
- 下游空间 AI 应用(机器人导航、AR)
References
- Chung, C.-M., et al. (2022). Orbeez-SLAM: A Real-time Monocular Visual SLAM with ORB Features and NeRF-realized Mapping. ICRA 2023. arXiv:2209.13274
- 代码: github.com/MarvinChung/Orbeez-SLAM
- ORB-SLAM2 笔记:跟踪后端
- Instant-NGP 笔记:建图后端
- GO-SLAM 笔记:类似拼装范式但用 DROID 跟踪