K2E-B-G5-11 · Paper Note
NeRF-VINS
- Description:NeRF-VINS 论文笔记 — 预建 NeRF 地图接入 MSCKF 视觉惯性导航,渲染合成图做 2D-2D 匹配产生地图约束,嵌入式实时 15 Hz
- My Notion Note ID:K2E-B-G5-11
- Created:2024-03-31
- Updated:2026-06-11
- License:转载欢迎:转载请注明作者 Yu Zhang 并附原文出处(yuzhang.io)
Table of Contents
- 1. Summary
- 2. Key Contributions
- 3. Method
- 4. Experiments & Results
- 5. Ablation & Discussion
- 6. Strengths / Limitations / Future Work
- References
1. Summary
Title: NeRF-VINS: A Real-time Neural Radiance Field Map-based Visual-Inertial Navigation System Authors: S. Katragadda, W. Lee, Y. Peng, P. Geneva, C. Chen, C. Guo, M. Li, G. Huang Paper: arXiv:2309.09295 (ICRA 2024) Github: 无官方代码
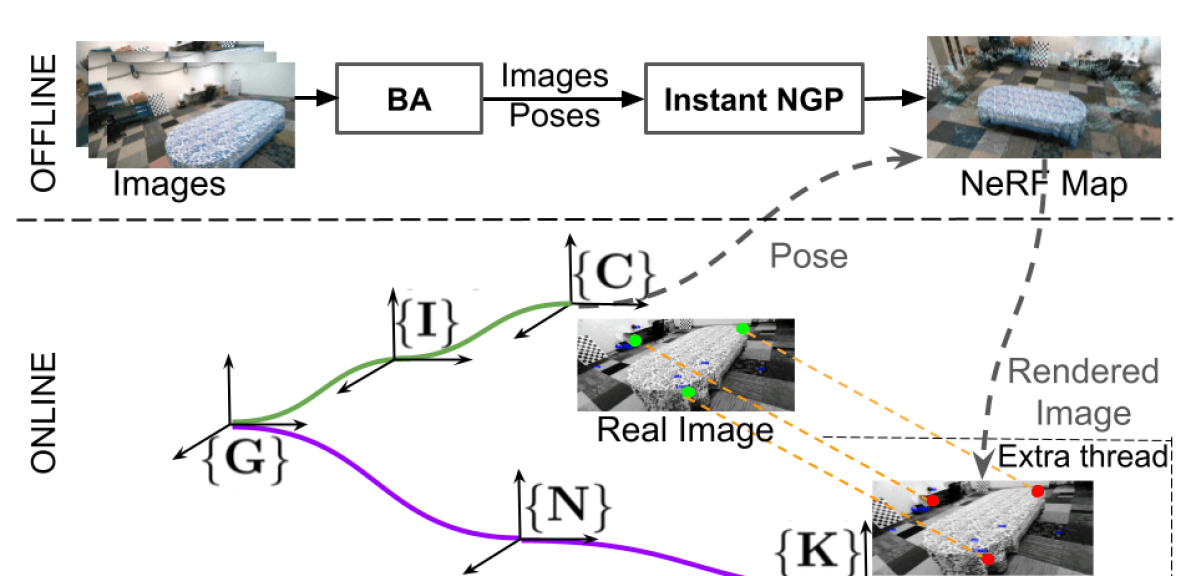
NeRF-VINS (UD RPNG 黄国权组, 2023):把预训练 NeRF 地图接入 MSCKF(Multi-State Constraint Kalman Filter,多状态约束卡尔曼滤波器,用零空间投影高效融合历史帧约束的 VIO 框架)视觉惯性导航系统。思路:NeRF 能从任意视角合成图像 → 在当前估计位姿附近渲染合成图,与实时帧做 2D-2D 特征匹配 → 产生地图约束(等价于对预建地图的连续回环/重定位),有效抑制漂移。强调嵌入式实时:Jetson AGX Orin 上 15 Hz。
与 NICE-SLAM 等"在线建图 SLAM"不同——NeRF-VINS 是用离线预建 NeRF 地图做在线导航 (map-based localization),更接近实际部署。
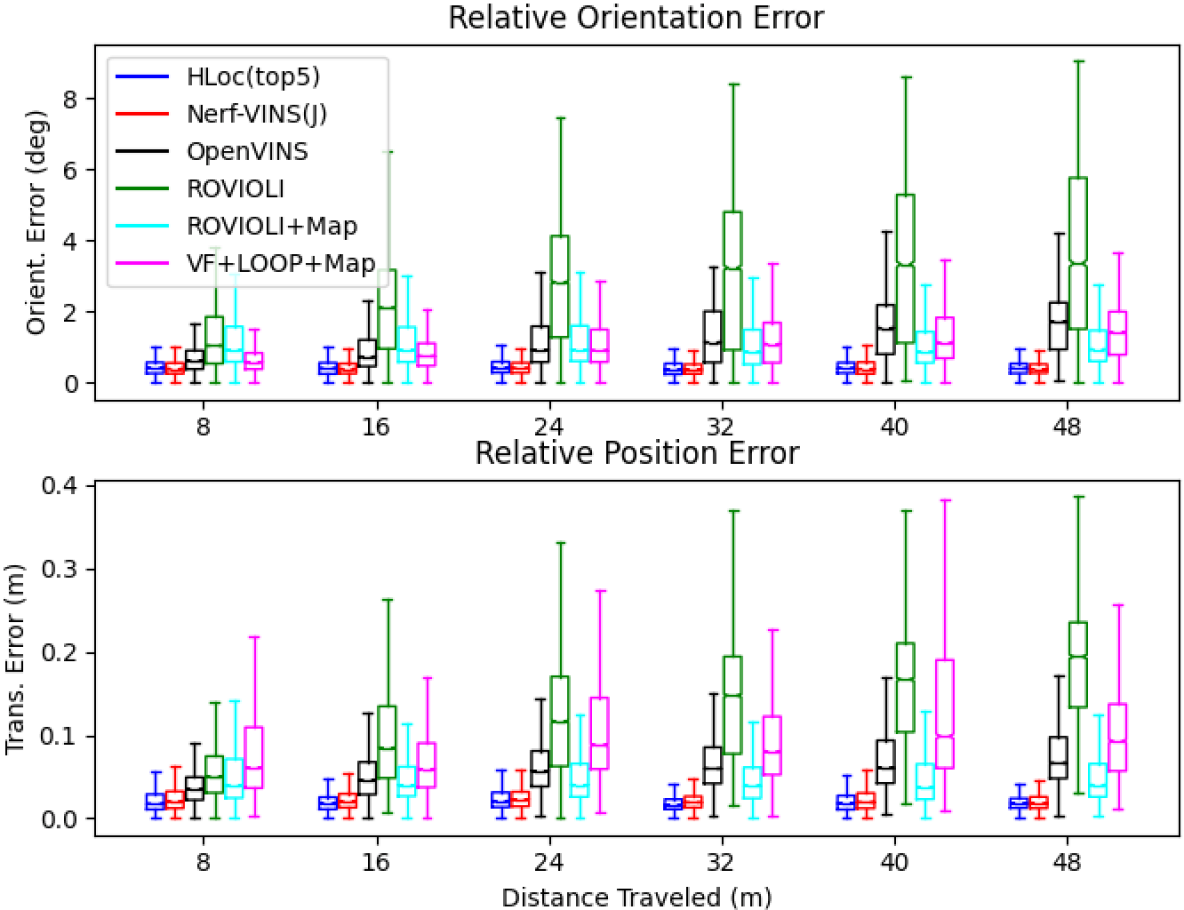
AR Table 数据集精度 ~0.44°/1.5 cm,优于 ROVIOLI+Map (1.32°/6.8 cm),与 HLoc top-50 相当 (~0.45°/1.3 cm) 但 HLoc 鲁棒性差(部分序列 top-5 定位失败率高达 39%),NeRF-VINS 无失败。
2. Key Contributions
- NeRF 地图约束接入 MSCKF:第一个把 NeRF 渲染合成图作为测量约束融入滤波器的实时 VINS
- 半分辨率 + FSRCNN 超分:渲染 212×140 (水平减半),FSRCNN(快速超分辨率卷积神经网络,轻量单图超分模型)上采样至 424×240,在嵌入式平台降渲染开销
- 嵌入式实时 15 Hz:Jetson AGX Orin,TensorRT 加速,SuperPoint(自监督关键点检测与描述子网络,ResNet18 骨干)特征匹配
- 鲁棒性:NeRF 合成图视角任意可控 → 适应实图视角受限区域;零定位失败率
3. Method
3.1 MSCKF 框架与状态
状态 = 惯导状态(位姿/速度/IMU bias)+ 历史 IMU 滑窗位姿 + 3D 环境点。
IMU 非线性运动学传播(白噪声 + bias 随机游走)。采用 MSCKF 混合策略:长期跟踪特征保留在状态中,短期特征用 MSCKF 零空间投影、不进状态(靠滑窗多帧约束)— 详见 MSCKF 笔记。
3.2 两类观测:实图 + NeRF 合成图
实图测量(标准 bearing 模型):
为相机 bearing 测量函数:先将地图点从全局系 变换到 IMU 系 ,再经外参 变换到相机系,最后投影:,( 为归一化投影);、 为误差状态(error state),即真值与估计值之差在切空间上的表示; 为实测特征像素坐标; 为对应状态的 Jacobian 矩阵。
NeRF 合成图测量:在当前估计位姿附近渲染合成图 → 与实时帧做 2D-2D SuperPoint 特征匹配 → 关联到 NeRF 地图坐标系中的 3D 点:
地图 3D 点 (NeRF 坐标系 )通过相似变换对齐到全局导航系 :,其中 为尺度, 为 NeRF 坐标系 到 的旋转, 为平移;该对齐参数离线标定(COLMAP 位姿 → Instant-NGP 训练后,地图坐标系与导航系存在不对齐,需显式修正)。NeRF 测量等价于对预建地图的持续约束 → 抑制全局漂移。
NeRF 地图由 COLMAP(运动恢复结构工具链,含稀疏重建与 Bundle Adjustment 位姿优化)优化位姿后训练(质量最好);渲染后端 Instant-NGP。
3.3 实时渲染策略
嵌入式实时关键工程:
| 步骤 | 细节 |
|---|---|
| 渲染分辨率 | 212×140(原分辨率 424×240 的约半,双边均降) |
| 超分辨率 | FSRCNN 上采样至 424×240(还原全分辨率) |
| 特征匹配 | SuperPoint 描述子(对低分辨率伪影鲁棒) |
| 加速框架 | TensorRT + ResNet18 |
| 渲染频率 | >10 Hz(独立线程,半分辨率) |
| 整体导航频率 | 15 Hz (Jetson AGX Orin) |
4. Experiments & Results
数据集
| 数据集 | 类型 | 评估 |
|---|---|---|
| AR Table | 真实桌面 AR 序列(8 个子场景) | ATE (°/cm) |
AR Table 定位精度
| Method | 旋转误差 (°) | 平移误差 (cm) | 失败率 |
|---|---|---|---|
| ROVIOLI+Map | ~1.32 | ~6.8 | — |
| HLoc top-5 | ~0.45 | ~1.3 | 高(Table2: 37%,Table5: 24%) |
| HLoc top-50 | ~0.45 | ~1.3 | 高(多序列 10-39%) |
| NeRF-VINS | ~0.44 | ~1.5 | 0% |
精度与 HLoc top-50 相当,但鲁棒性显著优于 HLoc(无失败序列);比 ROVIOLI+Map 精度提升约 3×。
5. Ablation & Discussion
- 无 NeRF 约束(仅 MSCKF):精度退化至 ROVIOLI 水平(~1.3°/6.8 cm);NeRF 地图约束是精度提升的关键
- 渲染分辨率:半分辨率 + FSRCNN 超分在质量损失极小的情况下将渲染时间降低约 6×(Jetson 全分辨率 ~660 ms/帧 → 半分辨率 + 超分后 ~67 ms/帧)
- HLoc 失败原因:HLoc 的 top-k 检索在部分序列中无法找到足够的匹配(视角受限);NeRF 可按需合成对应视角解决此问题
6. Strengths / Limitations / Future Work
Strengths
- 首个把 NeRF 地图约束融入 MSCKF 滤波器的实时 VINS,定位零失败
- 嵌入式部署可行:Jetson AGX Orin 15 Hz,功耗低
- NeRF 地图视角灵活,不受实际数据库视角限制
Limitations
- 需要离线预建高质量 NeRF 地图(COLMAP + Instant-NGP 训练),部署前成本高
- 地图静态假设:动态场景(移动物体)可能引发误匹配
- 仅在 AR Table 数据集验证,未测 ScanNet / TUM 等标准 SLAM 基准
Future Work
- 在线地图更新(将预建地图与在线建图结合)
- 更大规模室外场景验证
References
- Katragadda, S., et al. (2023). NeRF-VINS: A Real-time Neural Radiance Field Map-based Visual-Inertial Navigation System. ICRA 2024. arXiv:2309.09295
- 代码/数据集: github.com/rpng/open_vins
- MSCKF 笔记:滤波后端
- Instant-NGP 笔记:NeRF 渲染后端