K2E-B-S19-1 · Paper Note
WOLF — Modular Factor Graph Estimation Framework
- Description:WOLF 论文与代码笔记 — 基于因子图的模块化机器人估计框架,Wolf Tree 层次结构、传感器/处理器插件、预积分抽象 pipeline、YAML 自动配置、五类真机验证案例
- My Notion Note ID:K2E-B-S19-1
- Created:2023-06-08
- Updated:2026-06-11
- License:转载欢迎:转载请注明作者 Yu Zhang 并附原文出处(yuzhang.io)
Table of Contents
- 1. Summary
- 2. Key Contributions
- 3. Method
- 4. Experiments & Results
- 5. Ablation & Discussion
- 6. Strengths / Limitations / Future Work
- 7. Code Walkthrough
- References
1. Summary
Title: WOLF: A Modular Estimation Framework for Robotics Based on Factor Graphs Authors: Joan Solà, Joan Vallvé, Joaquim Casals, Jérémie Deray, Médéric Fourmy, Dinesh Atchuthan, Andreu Corominas-Murtra, Juan Andrade-Cetto (IRI, CSIC-UPC, Barcelona) Paper: arXiv:2110.12919 (IEEE RA-L 2022) Repo: IRI GitLab — wolf_lib
WOLF 是一个通用模块化估计后端框架,把机器人状态估计(定位、SLAM、传感器融合)统一表述成因子图。GTSAM(Georgia Tech Smoothing and Mapping,基于因子图和贝叶斯树的状态估计库)/g2o(通用图优化库,用稀疏 Schur 补求解位姿/地图点联合 BA)是纯优化库;WOLF 是包含前端(Processor)和后端(Solver wrapper)的完整估计框架,通过 solver wrapper 与 Ceres(Google 开源非线性最小二乘库,支持自动/手动微分和多种稀疏线性求解)/GTSAM/g2o/SLAM++ 等库对等对接——而非构建在它们之上。Core 自带 Ceres wrapper;GTSAM/g2o/SLAM++ 等可另行实现 wrapper。
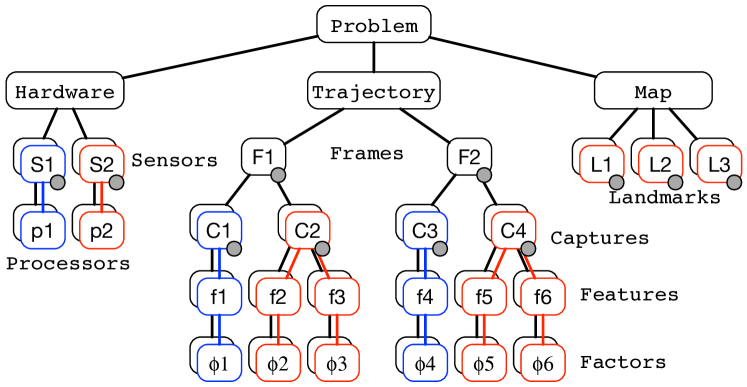
核心数据结构 Wolf Tree 把估计问题映射到三棵子树(Hardware、Trajectory、Map),所有节点以智能指针互连,因子图自动从中派生。加入新传感器只需写 Sensor + Processor 插件——不动核心代码。
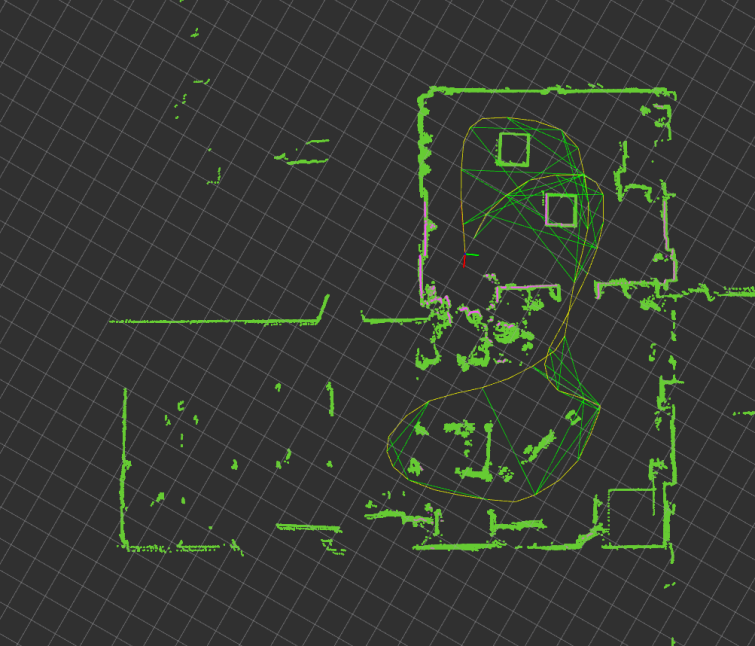
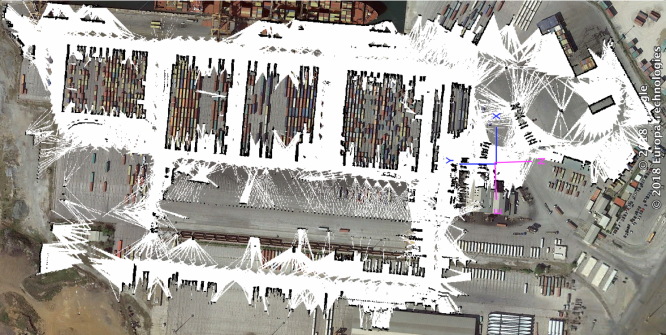
论文以五类真机场景验证:2D 激光建图、港口载运车 GNSS+激光、UAV GNSS+IMU、类人机器人视觉惯性、四足机器人全身状态估计,覆盖 wheeled / aerial / humanoid / legged 平台,估计精度从 cm 到亚厘米级,1 kHz 实时状态输出。
2. Key Contributions
- Wolf Tree:树状实体层级,跨支路指针连接 Sensor→Feature/Factor,使前端/后端信息共享(如激光里程计的关键帧可同时被 IMU 处理器访问)
- 抽象算法:Motion Pre-integrator(IMU/里程计/接触力统一 pipeline)、Feature/Landmark Tracker、Loop Closer——插件化,与传感器类型解耦
- 原生传感器自标定:外参、内参、预积分参数均可纳入状态在线估计
- 帧自动同步:多处理器按时间戳策略共享关键帧,无需手动对齐
- YAML 自动配置:无需重编码改变估计问题,只改 YAML
3. Method
3.1 Wolf Tree 层次结构
Problem
├── Hardware → Sensor(外参状态) → Processor
└── Trajectory → Frame → Capture → Feature → Factor
└── Map → Landmark
- Sensor:传感器 + 静态/动态参数 state block(外参在 Sensor 上,内参可选 Capture)
- Processor:数据处理单元,生成 Capture / Feature / Factor;Motion Pre-integrator 和 Tracker 是两大抽象子类
- Frame:一个时刻的状态(位姿+其他)
- Factor:因子图的约束边,含残差函数 及雅可比
MAP 代价函数:估计问题统一为
:第 个因子的残差;:对应协方差(Mahalanobis 加权);:鲁棒核(可选)。Wolf Tree 中每个 Factor 对应一个 。
3.2 Motion Pre-integrator Pipeline
适用于 IMU、轮式里程计、接触力积分等:
:原始测量;:标定参数估计;:单步 delta;:累积预积分量;:预积分流形复合运算(将新 delta 右乘到累积量上,在旋转等非欧流形上正确传播)。
协方差传播:
雅可比符号 (同 §1 符号): = 新旧累积量间的转移雅可比; = 累积量对单步增量 的雅可比; = 对中间量 的雅可比(); = 对原始测量 的雅可比; = 测量噪声协方差。第二项展开即通过链式法则把测量噪声传播到累积量协方差。
标定参数雅可比:
高频状态输出(用于控制):
:流形加法(boxplus retraction),将切空间增量 映射回流形上的状态 ;对 退化为指数映射 + 四元数乘法。kHz 量级计算量,适合嵌入式 / 实时控制。
3.3 传感器自标定(三策略)
区分静态/动态,与外参/内参正交:
- 静态参数(固定外参、相机内参等)→ Sensor state block,优化时始终可见
- 动态参数(IMU bias、时变外参等)→ Capture state block,随时间变化
- 预积分参数标定:标定量通过一阶展开修正而无需重积分:(:切空间扰动加法,在流形切空间上将线性修正叠加到名义预积分量)
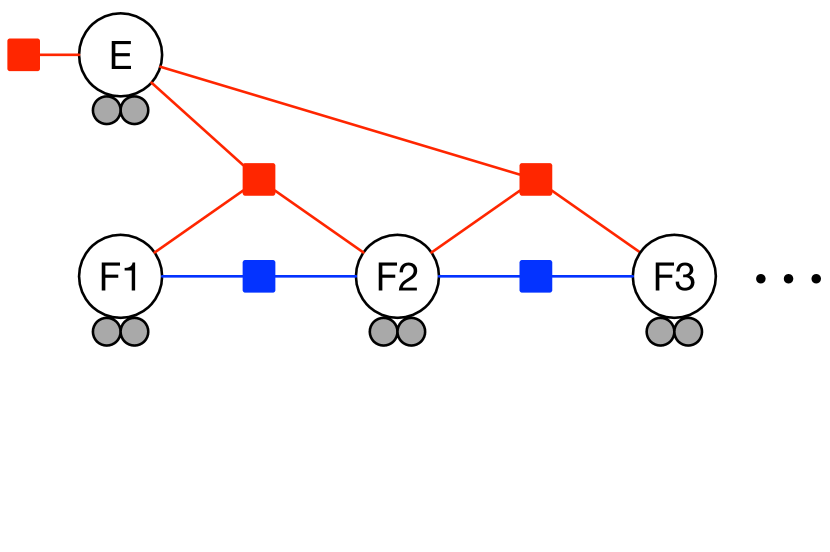
3.4 因子图可视化
4. Experiments & Results
五个真机验证案例(非基准数字比较,重点展示框架通用性):
| 案例 | 传感器 | 平台 | 关键精度 |
|---|---|---|---|
| Demo | 2D LIDAR + 轮式里程计 | Turtlebot | 室内地图连续闭合 |
| LOGIMATIC | GNSS + 轮式里程计 + 4×LIDAR | 8 轮港口载运车(~1000×500 m) | GNSS TDCP(Time-Differenced Carrier Phase,载波相位差分,消公共误差后 cm 级精度) |
| GAUSS | 2× GNSS + 低成本 IMU | UAV (M600) | 伪距 ~1 m;TDCP ~cm |
| MEMMO-vision | 相机 + IMU(AprilTag) | HRP-2 类人机器人 | 漂移 ≤ 4 cm,200 Hz 输出 |
| MEMMO-forces | IMU + 关节编码器 + 电机电流 | Solo12 四足机器人 | 全身状态估计 1 kHz,延迟 < 1 ms |
5. Ablation & Discussion
WOLF 论文无传统消融实验(重点是框架展示,非单项指标比较)。以下是设计权衡讨论:
- Wolf Tree vs 直接用 GTSAM/g2o:Wolf Tree 提供跨支路信息共享(如 Processor A 的关键帧可被 Processor B 访问),GTSAM/g2o 是纯图优化库,需应用层自行管理这些连接
- 多线程策略:Solver 独立线程 + 每个 ROS publisher 独立线程 + 每 Processor 单线程(当前实现)——并行程度有限,未来可扩展
- YAML 配置 vs 硬编码:灵活性换来运行时类型检查难度增加,配置错误只在运行时暴露
6. Strengths / Limitations / Future Work
优点:
- 真正模块化:加传感器 = 写插件,不改核心
- 覆盖传感器类型极广(视觉、IMU、激光、力矩、GNSS)
- 原生支持传感器自标定,工程完整
- YAML 配置简化部署
局限:
- Core 只自带 Ceres wrapper;GTSAM/g2o 需自行实现 wrapper
- 当前 Processor 单线程,高频多传感器场景有瓶颈
- 文档和社区规模远小于 GTSAM/g2o
后续:
- 更多 solver wrapper(GTSAM、g2o 官方支持)
- 多线程 Processor 扩展
- 更完整的视觉 SLAM 插件
7. Code Walkthrough
7.1 目录结构
wolf/
include/core/
common/node_base.h ← 所有节点共同基类
state_block/node_state_blocks.h ← 含状态块的中间基类
hardware/sensor_base.h ← Sensor 基类
processor/processor_base.h ← Processor 基类
trajectory/frame_base.h ← Frame 基类
factor/factor_base.h ← Factor 基类(含残差接口)
landmark/landmark_base.h
src/core/ ← 各基类实现
plugin/ ← 插件(vision/imu/laser/gnss/bodydynamics)
solver/ ← solver wrapper(目前 Ceres)
7.2 NodeBase — 所有节点基类
include/core/common/node_base.h:
- 身份:
node_id_(静态计数器,全局唯一)、node_category_、node_type_、node_name_ problem_ptr_:weak_ptr指回根 Problem(取用时.lock())is_removing_:安全移除标志
7.3 父子链设计
无统一 "linked node" 基类;父子关系放在各节点类型内:
- 向上(父):
weak_ptr(如FrameBase持TrajectoryBaseWPtr trajectory_ptr_) - 向下(子):
shared_ptr列表(如FrameBase持CaptureBasePtrList capture_list_) link()/remove()负责接入/移除树- weak 向上 + shared 向下 → 免环引用,生命周期自动管理
含状态块的节点(Frame / Sensor / Landmark 等)继承 NodeStateBlocks(在 NodeBase 之上加 state block 管理)。
7.4 Factor — 约束边接口
// 派生类需实现:
virtual Eigen::VectorXd evaluateResiduals() const;
virtual JacobianMethod getJacobianMethod() const; // ANALYTIC / AUTO / NUMERIC
virtual Eigen::MatrixXd evaluateJacobians() const;
Ceres wrapper 从 Factor 基类的这些接口自动构建 ceres::CostFunction。
7.5 Processor — 处理器接口
ProcessorBase
├── ProcessorMotion ← 预积分 pipeline(IMU/里程计/接触力)
└── ProcessorTracker ← 特征跟踪(两种变体:跨帧 / 与 Map 地标关联)
ProcessorMotion 的核心流程直接对应 §3.2 的抽象 pipeline(pre-calibrate → delta → integrate → covariance)。
7.6 paper-vs-code 差异
| 论文 | 代码 |
|---|---|
| "arbitrary solver backends" | Core 仅含 Ceres wrapper;GTSAM/g2o 为可对接选项(需实现 wrapper) |
| 预积分"线性化 bias 修正" | ProcessorMotion 子类(IMU 插件)实现;标定 Jacobian 存在 J_Delta_calib |
| YAML 配置完整建问题 | ProblemLoader 解析 YAML → 动态实例化 plugin 类(需 plugin 注册) |
References
| 类别 | 链接 |
|---|---|
| 论文 | Solà J. et al. (2022). WOLF: A Modular Estimation Framework for Robotics Based on Factor Graphs. IEEE RA-L. arXiv:2110.12919 |
| 代码 | gitlab.iri.upc.edu/mobile_robotics/.../wolf |
| 文档 | mobile_robotics.pages.iri.upc-csic.es/wolf-doc-sphinx |
| 相关 | 因子图优化见 SLAM 学习资源;预积分理论见 VIO 预积分 |